
Automotive companies always seek to find alternative ways of operating vehicles more efficiently to cope with the high-performance standards driven by customers. Using hybrid powertrains, which combine two or more power sources, significant improvements in fuel efficiency and emissions are possible. However, including the new power sources and the accompanying energy storage systems increase the system’s complexity extensively, requiring new design approaches. In this project, a method developed for the concurrent design of control algorithms has emerged as the main contribution. The work uses two interacting control problems from the automotive design field. Two control systems are operated together using a combined supervisory controller, and improvements are investigated using simulations. As the interaction between these two problems grows, significant improvements in fuel consumption and wheel slip behavior can be achieved when the control problems are solved. Methods to design subsystems that consider the effects of other subsystems in complex projects are important. This contributes to the automotive literature, where the systems are designed separately by different groups, and then ad-hoc fixes are implemented for improvements later in the design stages.
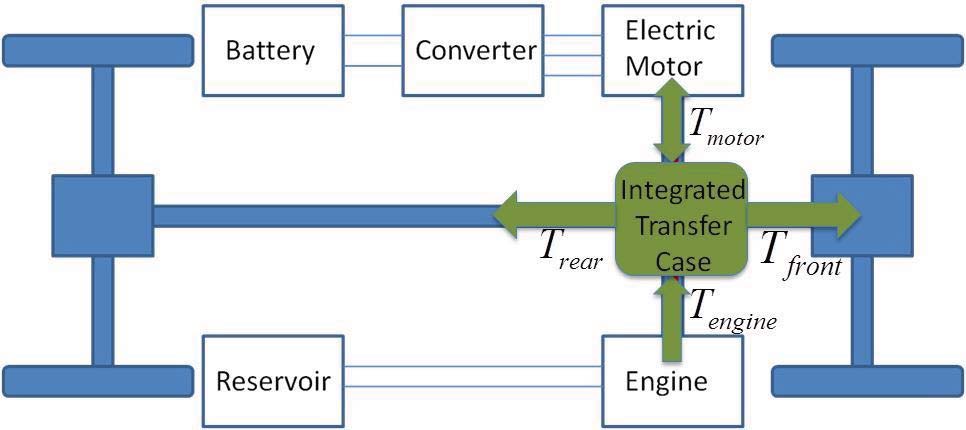
Over the past two decades, there have been many advancements in the automotive field, with the increased interaction of vehicle subsystems traditionally designed separately. Vehicle communication networks, low-cost sensors, and dependable mechatronic actuators play an important role in this new trend, which leads to designing the vehicle as a single mechatronic system, generating redundancies in control problems. One example of this redundancy can be seen when yaw rate control (i.e., regulation of vehicle rotation about the z-axis) in vehicle stability control is considered. Recently, electric in-wheel motors are getting popular, which leads to an increased ability of traction control at each wheel. Using torque vectoring, traction controllers can regulate the yaw rate of the vehicle by changing the torque at each wheel. Four-wheel independent steering is another way of affecting the yaw rate in passenger vehicles. This technology is becoming feasible due to dependable actuators at lower costs.
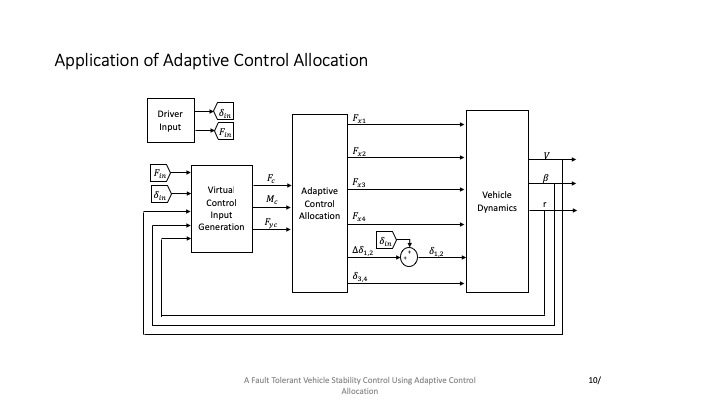
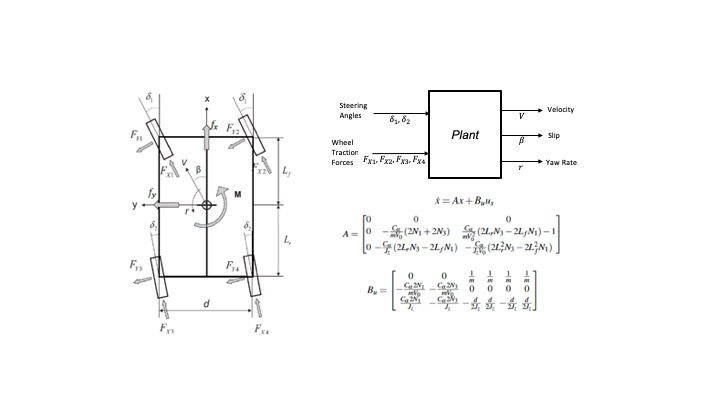
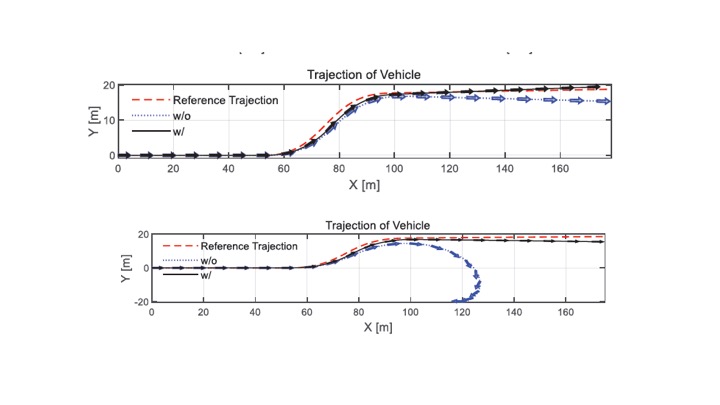
Initial results show that an adaptive control allocation method for vehicle stability control can be developed using both traction steering control subsystems. The controller is developed based on the linearized version of the reduced two-track model, and simulations are performed on the non-linear version of the reduced two-track model. Results from the simulations show that the proposed controller performs better and is safer than proportionally controlled baseline four-wheel drive and steering systems. It is also shown in simulations that the proposed control scheme can compensate for failures that occur in the vehicle or variations in the environment during driving.